Organization
Group A01
A design theory of high-average systems made possible by constructive understanding of heterogeneous swarm intelligence
Research Outline
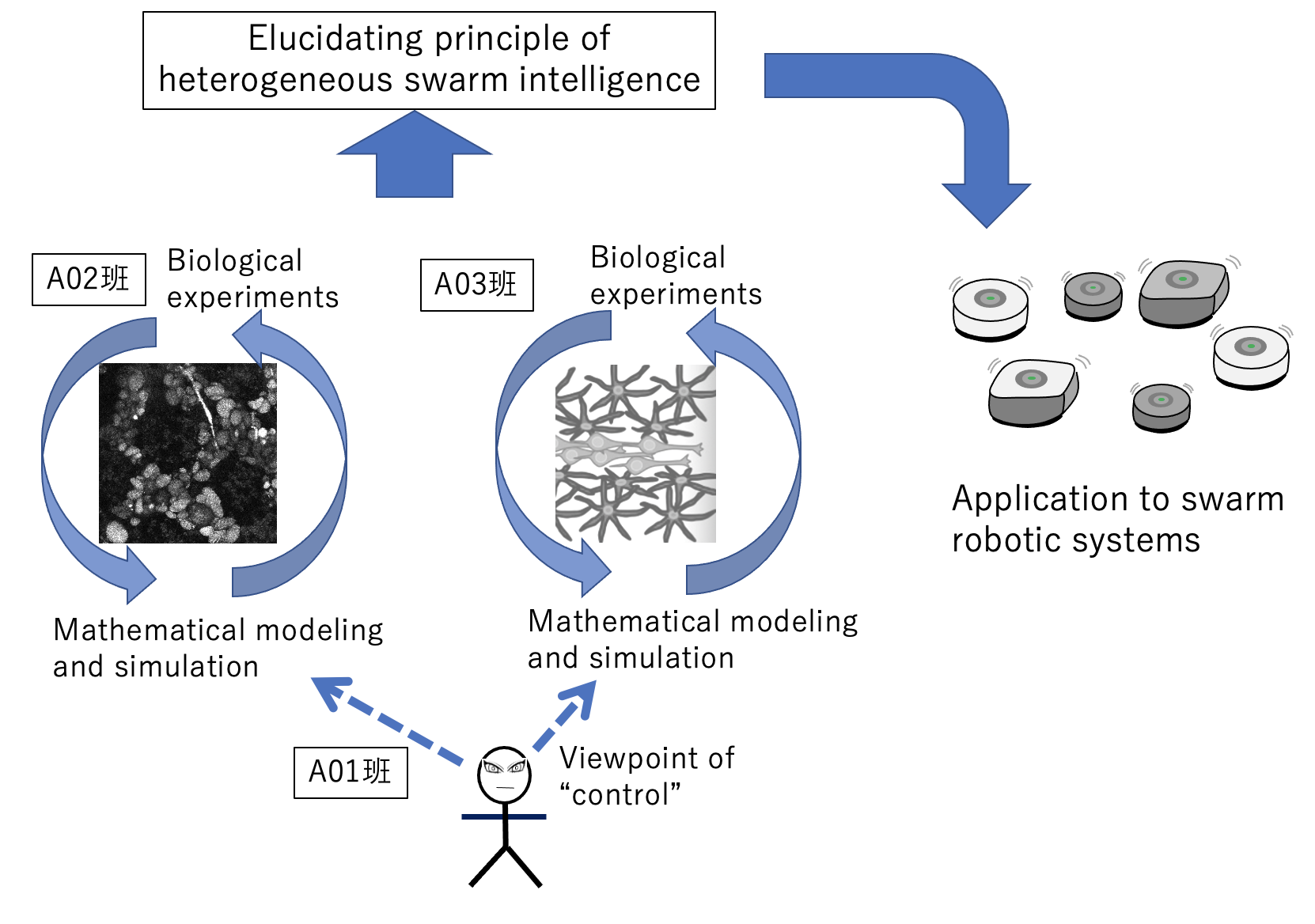
In this study, we propose a heterogeneous swarm intelligence system in which individuals with various characteristics can find optimal internal states and roles to play in a fluctuating environment while creating order and performing high-average functions adaptively. To solve this problem, Groups A02 and A03 will explore the population dynamics of diverse cell populations by analyzing real data with high precision. On the contrary, this project group (group A01) will explore the essential factors that cause heterogeneous cell population dynamics by mathematical modeling and simulation. We will deepen the discussion based on the control perspective and find the control principles that can explain the experimental results of A02 and A03 groups. Furthermore, we will develop swarm robots using the extracted control principle and show that the principle applies to a scale larger than cells. Simultaneously, we aim to realize a real-world artificial object with high-average functions in a fluctuating environment.
Group A01 members
Project Leader
Takeshi Kano (School of Systems Information Science, Future University Hakodate)

The self-organization phenomenon, in which individual components interact with each other to create overall order, is widely observed in natural and social systems. I am attempting to clarify the core principle of the self-organization phenomenon through mathematical modeling and to construct a "rational" autonomous decentralized control method applicable to various systems based on this principle.
Educational and Professional Background Takeshi Kano, M.D., Ph.D.
- 2002.3
- School of Medicine, Hokkaido University (obtained a MD)
- 2008.3
- Graduate School of Frontier Biosciences, Osaka University (obtained a PhD)
- 2008.4 – 2009.7
- Postdoctoral Fellow, Graduate School of Frontier Biosciences, Osaka University
- 2009.8 – 2011.3
- Assistant Professor, Tohoku University (Graduate School of Medicine)
- 2011.4 – 2016.9
- Assistant Professor, Research Institute of Electrical Communication, Tohoku University
- 2016.10 – 2024.3
- Associate Professor, Research Institute of Electrical Communication, Tohoku University
- 2024.4 –
- School of Systems Information Science, Future University Hakodate
Co-Project Leader
Yuichiro Sueoka (Graduate School of Engineering, Osaka University)

For the concept of swarm, I am advocating the philosophy of “super-swarm”, which aims to design unseen artifacts and robots by combining the biological power and imaginary power. Currently, he is engaged in research on robots for the Moonshot Project of the Cabinet Office, working on robots for the Moon and robots for disaster response. He also aims to realize a society where everyone is involved in robotics, and will launch a crowdfunding project Robo Cafe in 2019 and co-found Minna no Kousei Juku in October 2021. He also writes about ideas for “realizing fantasies” on his personal blog.
Educational and Professional Background Yuichiro Sueoka, Ph.D.
- 2015.4 –
- Assistant Professor Osaka University,
- 2019.7
- President Crowdfunding Project, Robo Café
- 2021.10
- Co-founder and Director, Minna no Kousei Juku
A01-Employed Project Assistant Professor
Daiki Wakita (2022.7-2024.3: Research Institute of Electrical Communication, Tohoku University)

In my childhood, I used to wonder how starfish could move around with varying numbers and lengths of arms. After I had delved into this mystery in my doctoral research, I have recognized a starfish not as an individual controlled by a brain, but rather as a group of arms loosely interacting with each other. Loose interactions would exist between individuals and between cells, and the interacting members would have a diversity. Building a mathematical model while respecting such "organism-likeness," I explore the entity that makes movement flexible to various situations.
Educational and Professional Background Daiki Wakita, Ph.D.
- 2015.3
- Department of Biological Sciences, School of Science, Hokkaido University (Bachelor of Science)
- 2017.3
- Department of Natural History Sciences, Graduate School of Science, Hokkaido University (Master of Science)
- 2020.3
- Division of Life Science, Graduate School of Life Science, Hokkaido University (Doctor of Life Science)
- 2020.4 – 2022.3
- Postdoctoral Researcher, School of Advanced Sciences, The Graduate University for Advanced Studies
- 2022.4 – 2022.6
- Postdoctoral Researcher, Research Center for Integrative Evolutionary Science, The Graduate University for Advanced Studies
- 2022.7 – 2024.3
- Project Assistant Professor, Research Institute of Electrical Communication, Tohoku University
- 2024.4 –
- Project Researcher (JSPS Researcher PD), Misaki Marine Biological Station, The University of Tokyo
