研究組織
A01班
ヘテロ群知能の構成論的理解から切り拓くハイアベレージなシステムの設計論
代表者 加納 剛史(はこだて未来大学システム情報科学部)
分担者 末岡 裕一郎(大阪大学大学院工学研究科)
研究紹介
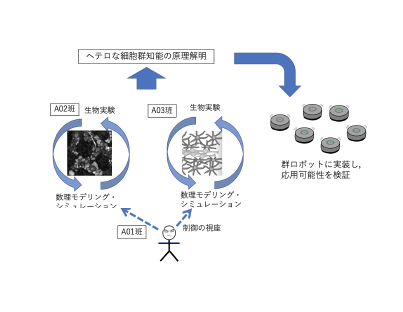
本研究では、様々な性質を持つ個体が変動環境下において、適切な内部状態や果たすべき役割を自身で見つけながら秩序を創発し、適応的にハイアベレージな機能を発揮するヘテロな群知能システムを提案します。この問題に取り組むため、A02、A03班では多種多様な細胞の群れの集団動態を高精度の実データ解析により探りますが、本計画班(A01班)では逆に、数理モデリングとシミュレーションによりヘテロな細胞の集団動態が発現する本質的な要因を構成論的に探ります。制御の視座に基づき考察を深め、A02、A03班の実験結果を説明し得る制御原理を見出します。さらに、抽出した制御原理を用いて群ロボットを開発し、細胞より大きなスケールでも原理が通用することを示すと同時に、変動環境下でハイアベレージな機能を発揮する人工物を実世界実現することを目指しています。
A01班メンバー紹介
研究代表者
加納 剛史 (はこだて未来大学システム情報科学部)

経歴
- 2002.3
- 北海道大学医学部医学科 卒業、医師免許取得
- 2008.3
- 大阪大学大学院生命機能研究科博士課程修了、博士(理学)取得
- 2008.4 – 2009.7
- 大阪大学大学院生命機能研究科 特任研究員
- 2009.8 – 2011.3
- 東北大学 助教 (大学院医学系研究科)
- 2011.4 – 2016.9
- 東北大学電気通信研究所 助教
- 2016.10 – 2024.3
- 東北大学電気通信研究所 准教授
- 2024.4 –
- はこだて未来大学システム情報科学部 教授
研究分担者
末岡 裕一郎 (大阪大学大学院工学研究科)

「群れ」という概念に対し、「生物の力」×「妄想の力」で、誰もみたことのない人工物やロボットを設計する「超群」の理念を提唱している。現在、内閣府ムーンショットプロジェクトにて、月面開発用のロボットや、災害対応ロボットの研究に従事している。また、「誰もがロボットと携わる社会実現」を目指し、2019年にはクラウドファンディングプロジェクト Robo Cafeを立ち上げ、2021年10月みんなの制御塾を共同設立している。個人のブログにて「妄想を具現化する」アイデアも執筆している。
経歴
- 2015.4 –
- 現在 大阪大学大学院工学研究科 助教
- 2019.7
- クラウドファンディングプロジェクト Robo Café 代表
- 2021.10
- みんなの制御塾 共同設立 理事
A01班雇用 特任助教
脇田 大輝 (2022.7–2024.3 東北大学電気通信研究所)

子供のころヒトデを見ていて、腕の数や長さがまちまちでも普通に動けるのを不思議に思いました。博士研究でこの謎に迫ったところ、1匹のヒトデを「1つの脳で支配された個体」と見るより、「何本か繋がった腕がゆるくやりとりする集団」と見たほうがしっくりきました。ゆるいやりとりは生物種によらず細胞間にも個体間にもあるはずで、しかもやりとりするメンバーには多様性があるはずです。こういった「生物らしさ」を尊重した数理モデリングから、「動きを臨機応変にするもの」の実態を探ります。
経歴
- 2015.3
- 北海道大学理学部生物科学科 卒業
- 2017.3
- 北海道大学大学院理学院自然史科学専攻修士課程 修士(理学)取得
- 2020.3
- 北海道大学大学院生命科学院生命科学専攻博士後期課程 博士(生命科学)取得
- 2020.4 – 2022.3
- 総合研究大学院大学先導科学研究科 特別研究員
- 2022.4 – 2022.6
- 総合研究大学院大学統合進化科学研究センター 特別研究員
- 2022.7 – 2024.3
- 東北大学電気通信研究所 特任助教
- 2024.4 –
- 東京大学大学院理学系研究科附属臨海実験所 特任研究員(日本学術振興会特別研究員-PD)
